
SME - Space Missions Engineering

ONGOING ACTIVITIES
- Non-Keplerian orbits. The research that has been conducted at SME Lab is aimed to analyze and explore the dynamics of both natural and artificial non-Keplerian orbits. In the former subclass, effort has been put to study the dynamics of the ballistic capture. A systematic method to derive ballistic capture orbits about a given body has been formulated. In the field of artificial non-Keplerian orbits, a design method based on the concept of attainable sets has been formulated. With this approach it is possible to merge low-thrust orbits and invariant manifolds of the restricted three-body problem. The concept relies on a simple definition of attainable orbit, and can be generalized to any n-body model.
- Optimal control and space trajectory optimization. At SME Lab, research on both optimal control and space trajectory design is being conducted. In optimal control, iterative methods based on successive approximations have been implemented for control-affine dynamics. In the field of space trajectory design, numerical methods for solving both the direct and indirect problems have been developed. These involve the application of a number numerical integration schemes coupled with different nonlinear programming solvers in both the two- and n-body problems.
- High-order methods for guidance, control, and uncertainty management. People at SME Lab have good records in the field of high order methods applied to astrodynamics. In particular, algorithms for the robust solution of two-point boundary value problems have been developed, as well as techniques for the high order sensitivity analysis and uncertainty mapping. Moreover, methods for deriving high-order optimal control about a reference solution have also been developed.
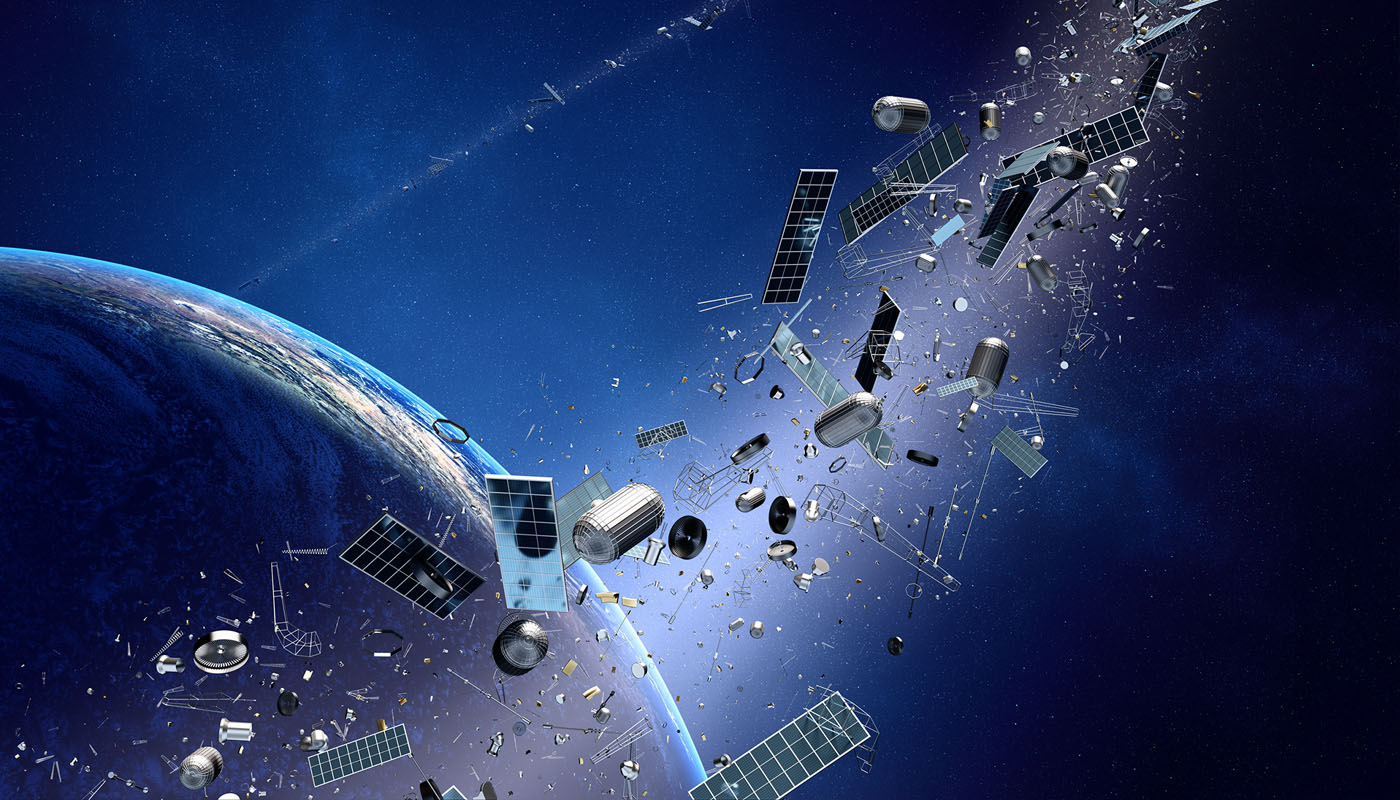
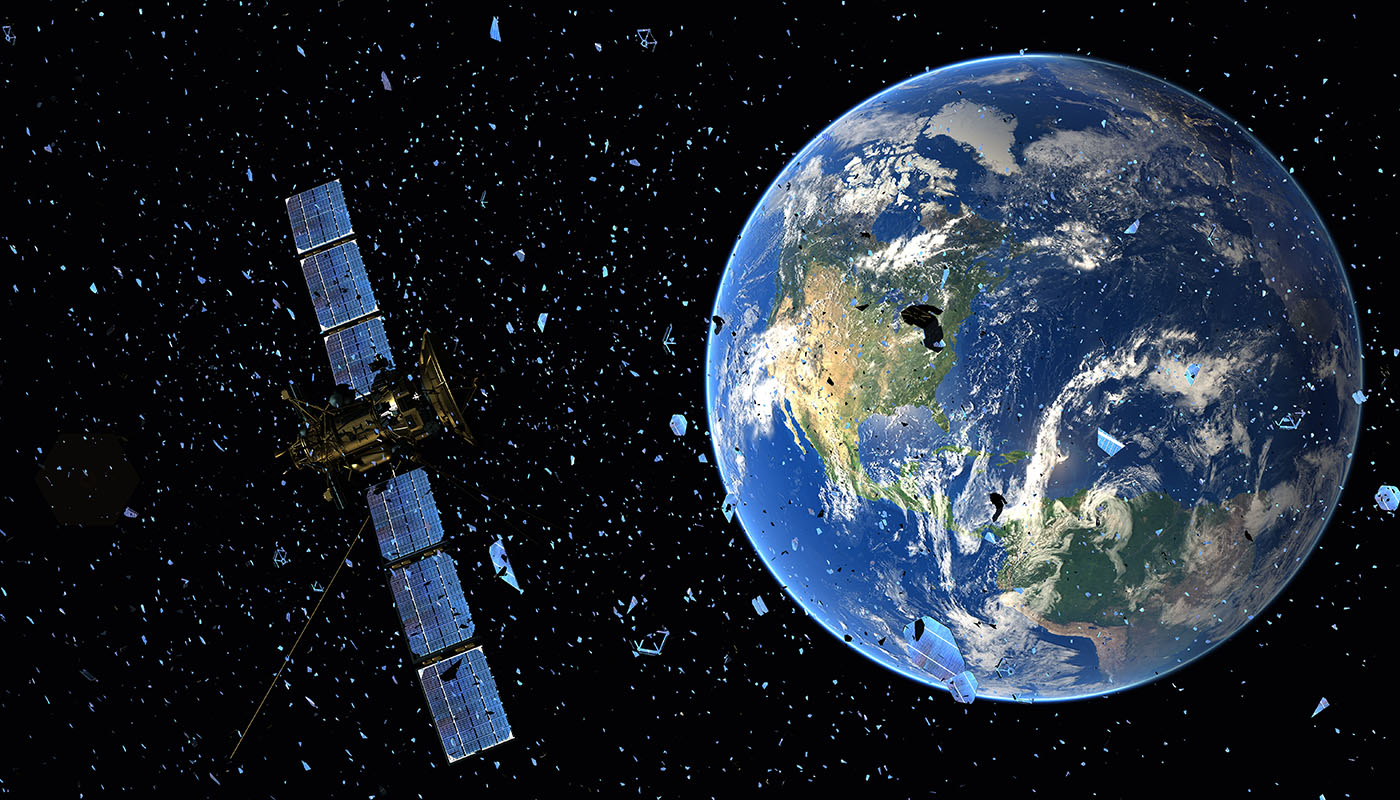
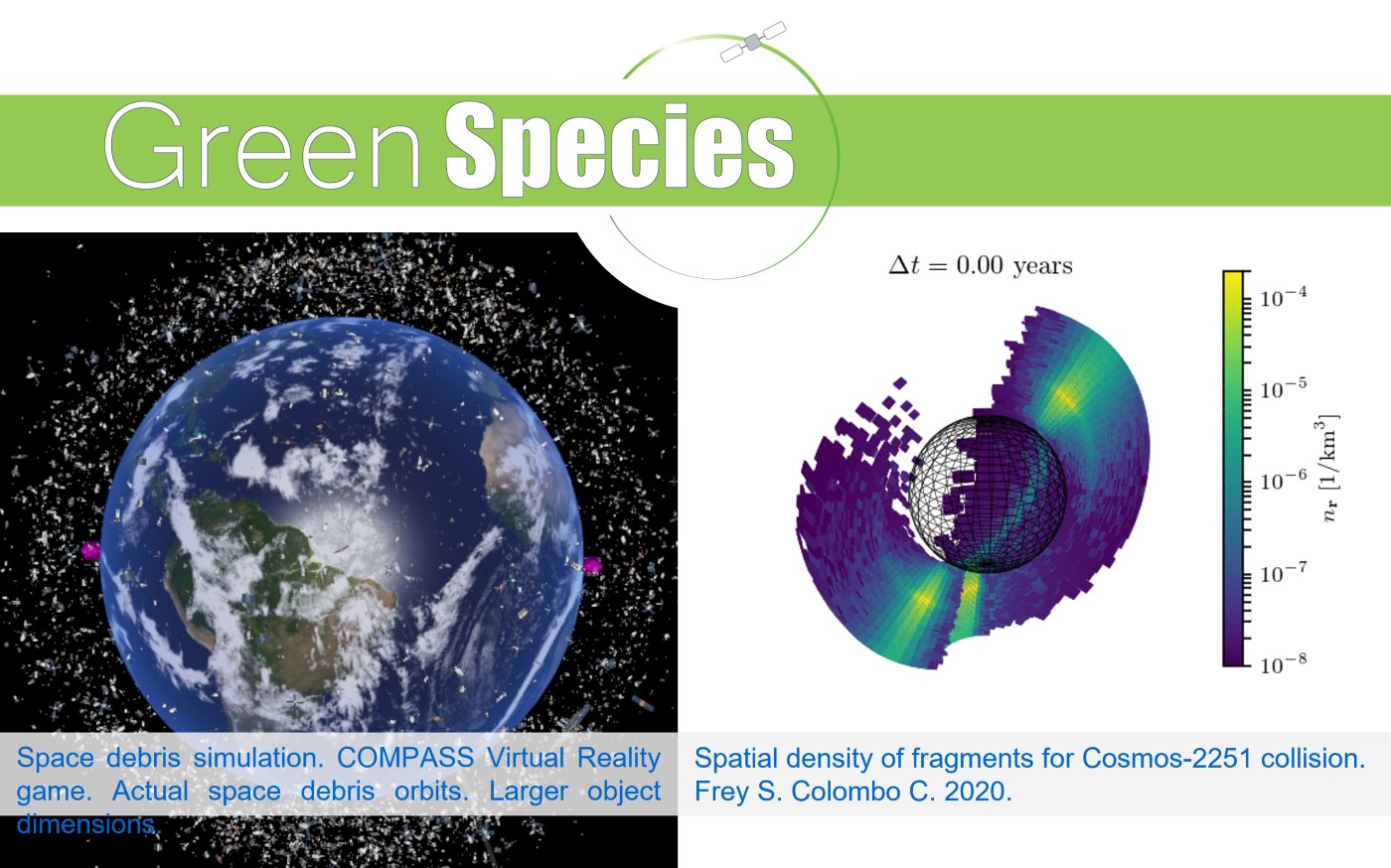
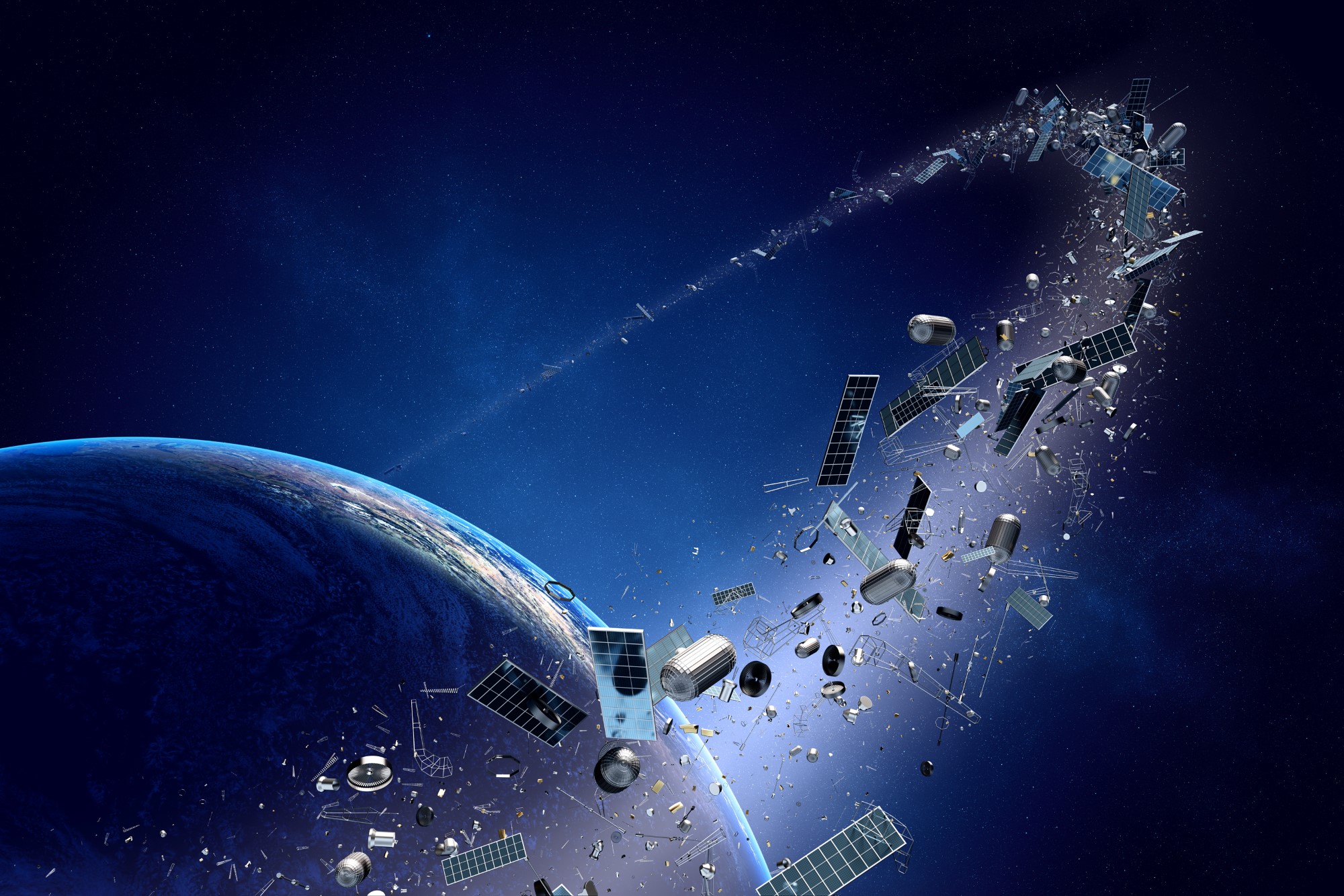
- Dynamics of space debris and NEOs. In this field the main achievements involve the development of a high-order nonlinear method for the accurate orbit determination; the development of a DA-based method for the accurate estimation of the Minimum Orbit Intersection Distance (MOID); the validate integration of Solar System Dynamics; the implementation of highly accurate dynamic models; the development of high-order nonlinear filtering techniques.
- Methodologies to support the system design: attention focused on multi-objective global optimizers comparison and selection; on multi-disciplines models tuning, selection and MDO results validation for the complex scenario of launchers and manned re-entry vehicles sizing. Testing of distributed architectures for multidisciplinary multicriteria design of human bases infrastructures such as greenhouses sizing.
- Advanced technologies: attention focused on the uncooperative orbiting proximity maneuvering and interaction tailoring, with a strong effort in developing the numerical simulators to: deal with nets dynamics during deployment and impact and to deal with tethers and flexible systems, dynamics and control synthesis; deal with the momentum and angular momentum exchange under no-contact scenarios, between plume particles and impinging surface. A breadboard to run experiments on net deployment has been implemented and test campaign has been performed.
- Algorithms for hazard maps generation during landing have been implemented and tested on artificial images, and input, still in open loop, to the landing adaptive guidance profile generator, implemented in the last year.
- Progresses towards the experimental testing of wireless sensors during environmental tests have been achieved. The testing campaign is almost ready to be run.
- Intelligent operations: harmonization of the already implemented tools for failure detection and identification has been performed, to prepare future activities related to critically compare different theoretical approach to the problem. Multi-agents techniques started to be applied to the complex scenario of the data management at ground stations to test their benefit in enhancing the data exploitation and the ground timely reaction to unpredictable events.
- Concerning robotic devices, the most recent studies on the SD2 drill have proven the existence of a correlation between the drill behavior during perforation and the mechanical characteristics of the cometary soil. This outlines the possibility of using SD2 not only as a tool to support other instruments, but also as a scientific instrument itself. The possibility of using the drill as a quasi-static penetrator has been studied. Within this approach, laboratory tests on glass-foam specimens of different porosity show that penetration failures can be exploited for cometary soil characterization.
FUTURE PLANS
- Non-Keplerian orbits. The future research in the field of non-Kepelrian orbits will be mainly focused on: a) the analysis of ballistic capture orbits in the real n-body problem; b) the refinement of the attainable set concept and its potential applications; c) the development of numerical methods to approximate the invariant manifolds; d) the implementation of n-body models and their analysis; e) the development of algorithm to optimize low-energy, low-thrust orbits.
- Optimal control and space trajectory optimization. In this field the future research will deal with: a) the analysis and improvement of the approximate methods for solving nonlinear optimal control and their possible application to other context; b) the development of trajectory optimization schemes for treating the low-thrust orbits in n-body models; c) the search for shape-based solutions in n-body models; d) the refinement of the existing methods for solving the indirect problems.
- High-order methods for guidance, control, and uncertainty management. In this field the future research will deal with: a) the application of the existing methods to models not yet studied to perform uncertainty analysis; b) the derivation of high order algorithms able to include control saturation; c) the implementation of high-order methods for the fast computation of Poincarè sections in generic dynamical systems; d) the development of novel methods for the high order expansion of invariant manifolds.
- Dynamics of space debris and NEOs. The planned activities in this field of the SME Lab are: a) to improve the existing high-order methods for orbit determination; b) to develop highly accurate models for dynamics of space debris and NEOs; c) to improve the current techniques for the high-order propagation of space debris and NEOs; d) to develop a system for combining observations of objects, orbit determination, and propagation.
- Methodologies to support the system design: refinement of the current distributed MDO architecture to support complex mission scenarios alternative pruning.
- Advanced technologies: refinement of the numerical simulator for the flexible systems GNC design. Breadboarding and testing of the critical hw\sw components in the navigation and control chain. Numerical simulator validation through experimental tests, potentially in flight.
- Experiment set up, and models characterization for the angular momentum exchange with no contact between orbiting vehicles.
- Improvement of the GNC tool for landing, experimental testing and navigation algorithms validation with hardware in the loop.
- Intelligent operations: multi-agents architectures exploitation to increase robustness in autonomous failure identification.
- Automatic acquisition of knowledge related to causal dependencies between symptoms and faults, fundamental to increase the identification process robustness.
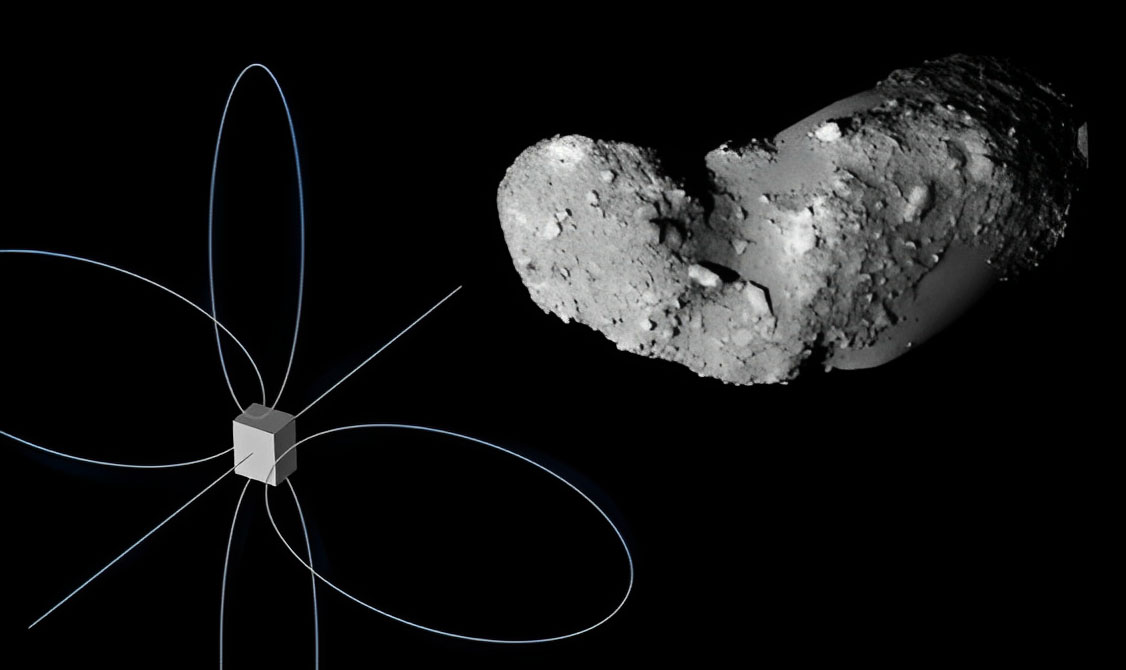
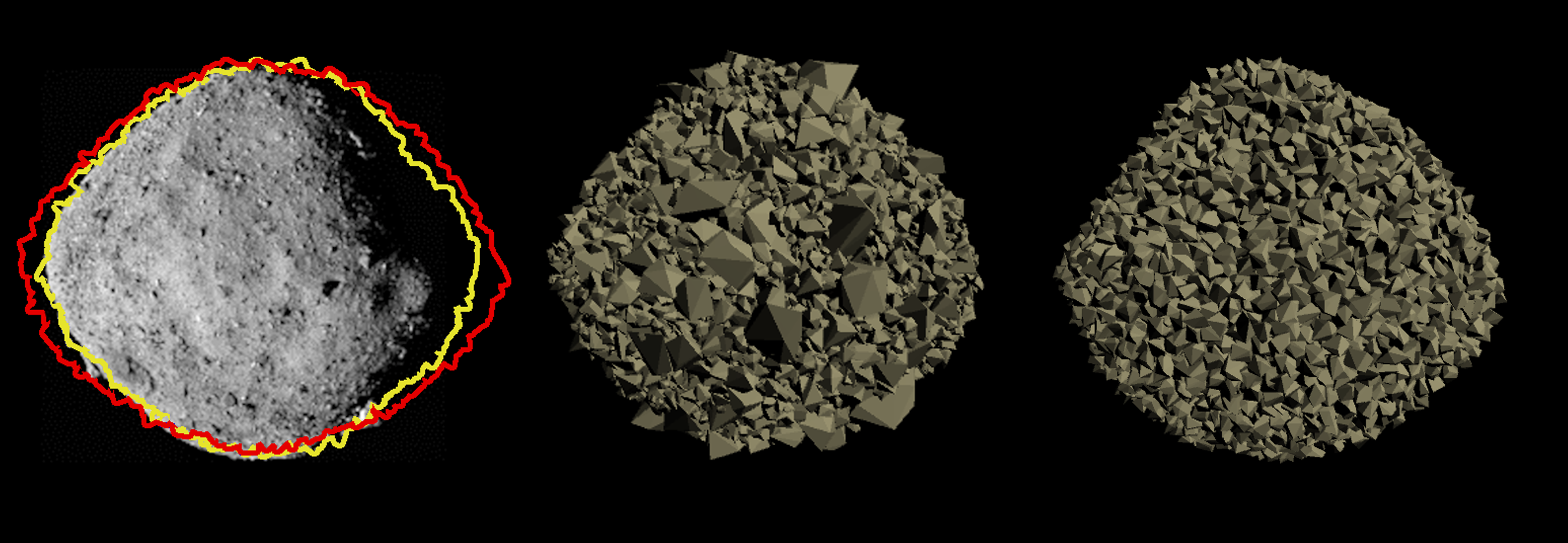
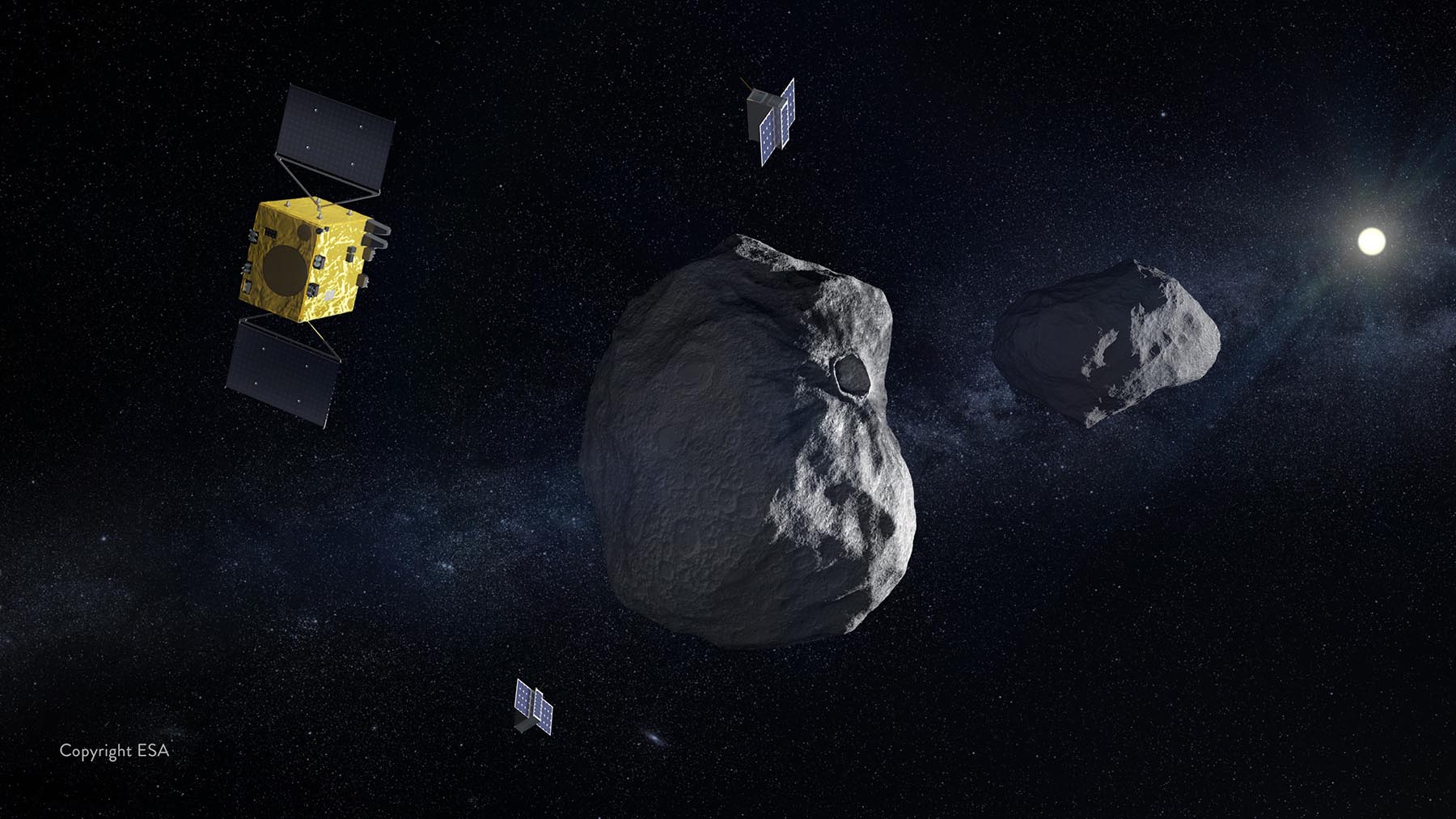
- In the domain of planetary sampling, the group will continue the activities undertaken on the SD2 system for the Rosetta mission and, considering the activity closed by the end of 2015, will start studying mechanisms suitable for the planned future exploration missions to low gravity bodies (e.g. a Mars moon or a near-Earth asteroid), where it is planned to collect more than 100 grams of regolith (dust plus cm-sized pebbles) and return them to Earth for further ground-based analysis. So far, there is no single sampling technology for low-gravity bodies that has undergone a rigorous engineering assessment, aiming at proving the ability of the sampler to collect material in any envisaged situation. This will be done by using the Discrete Element Methods (DEM), implemented to realize an affordable and reliable tool useful to investigate the sampling device dynamics in soil sampling activities in order to support the sampling tool concepts identification, trade off and selection.
ERC KEYWORDS
- PE9-15 Space Sciences
- PE7-10 Robotics
- PE7-4 Systems engineering, sensorics, actorics, automation
- PE8-1 Aerospace Engineering
FREE KEYWORDS
- Orbital dynamics
- Optimization and control
Research projects
HORIZON EUROPE | FAAST - Perfecting autonomous control for self-driving spacecraft
ASI | ORACLE - Oxygen Retrieval Asset by Carbothermal-reduction in Lunar Environment
ERC | GREEN SPECIES - Robust control of the space debris population to define optimal policies and an economic revenue model for sustainable development of space activities
ERC | GUIDO - A Computing Unit for Autonomous Spacecraft Guidance in Deep Space
ERC | TRACES - Transitions in Rubble-pile Asteroid Chaotic Environment and granular Structures
ERC | SENSE - A Sensor for Autonomous Navigation in Deep Space
ERC | EXTREMA - Engineering Extremely Rare Events in Astrodynamics for Deep-Space Missions in Autonomy
H2020 | ASCenSIon - Advancing Space Access Capabilities - Reusability and Multiple Satellite Injection
H2020 | STARDUST-R - Stardust Reloaded
ASI | GLASS - Waveguides for mulfifunctional Space Systems)
H2020 | HERMES-SP - High Energy Rapid Modular Ensemble of Satellites, Scientific Pathfinder
ASI | INNOVATIVE RESEARCH ACTIVITY - Advanced Materials for Space Applications
ERC | COMPASS - Control for Orbit Manoeuvring through Perturbations for Application to Space Systems
H2020 | S3NET - Satellite Swarm Sensor NETwork
H2020 | ReDSHIFT - Revolutionary Design of Spacecraft through Holistic Integration of Future Technologies
H2020 | PERSEUS - Promoting excellence and recognition seal of European aerospace Universities
Magazine Articles

THEMIS FOR TRACKING THE HEALTH OF THE ENVIRONMENT AND MISSIONS IN SPACE
2023 COSPAR OUTSTANDING PAPER AWARD FOR YOUNG SCIENTIST

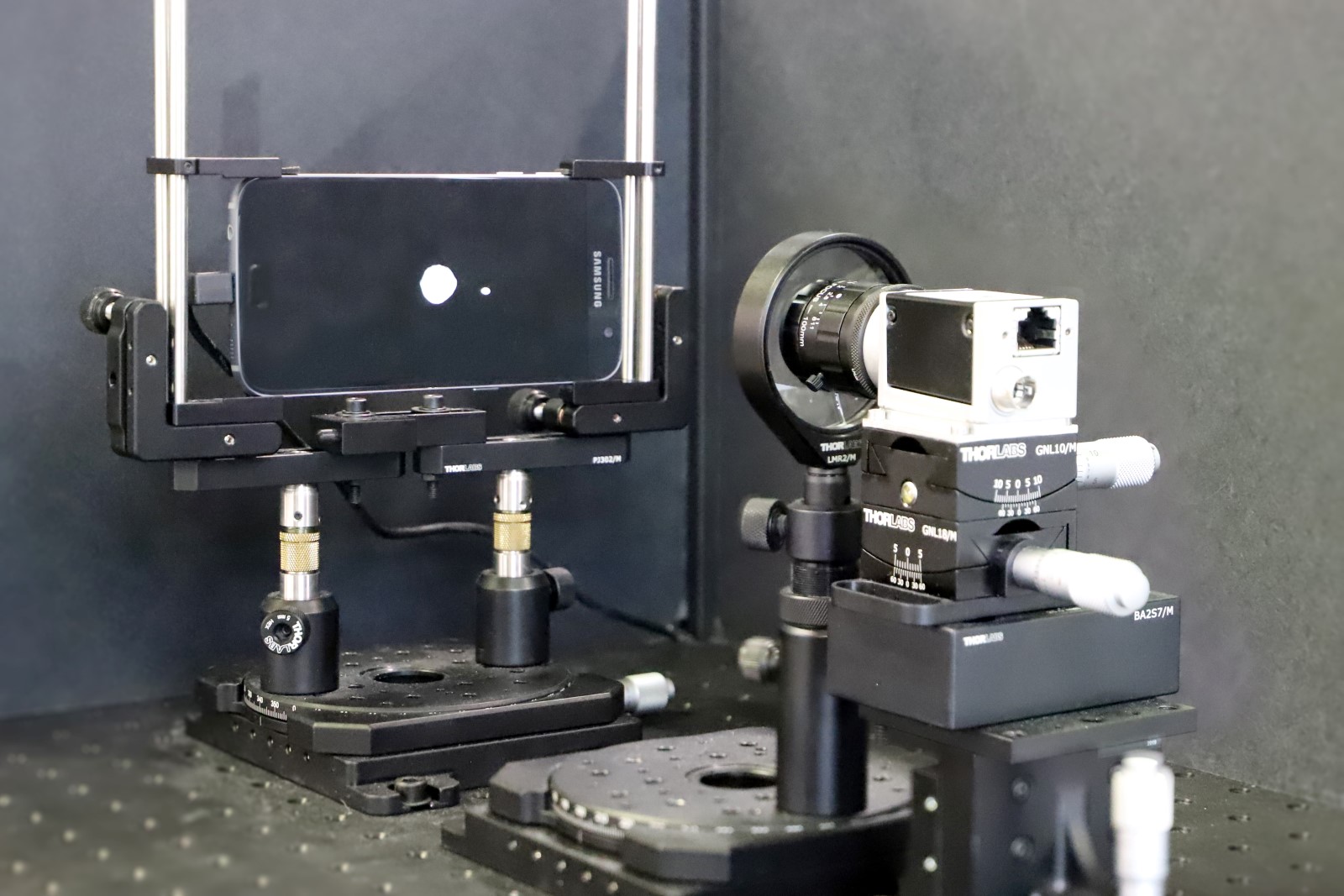
FROM HARDWARE-IN-THE-LOOP TO IN-ORBIT VERIFICATION AND TESTING OF CUBESAT ADCS ALGORITHMS

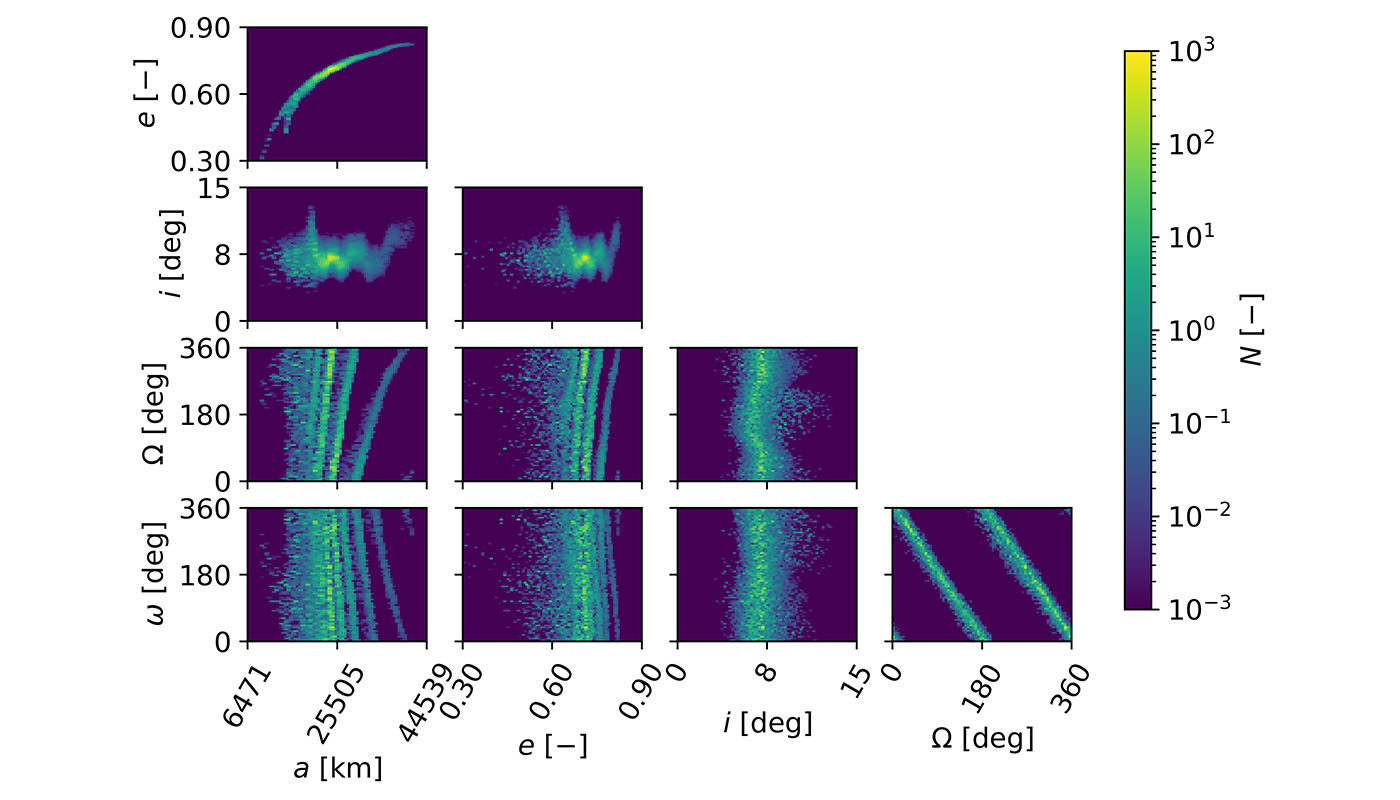
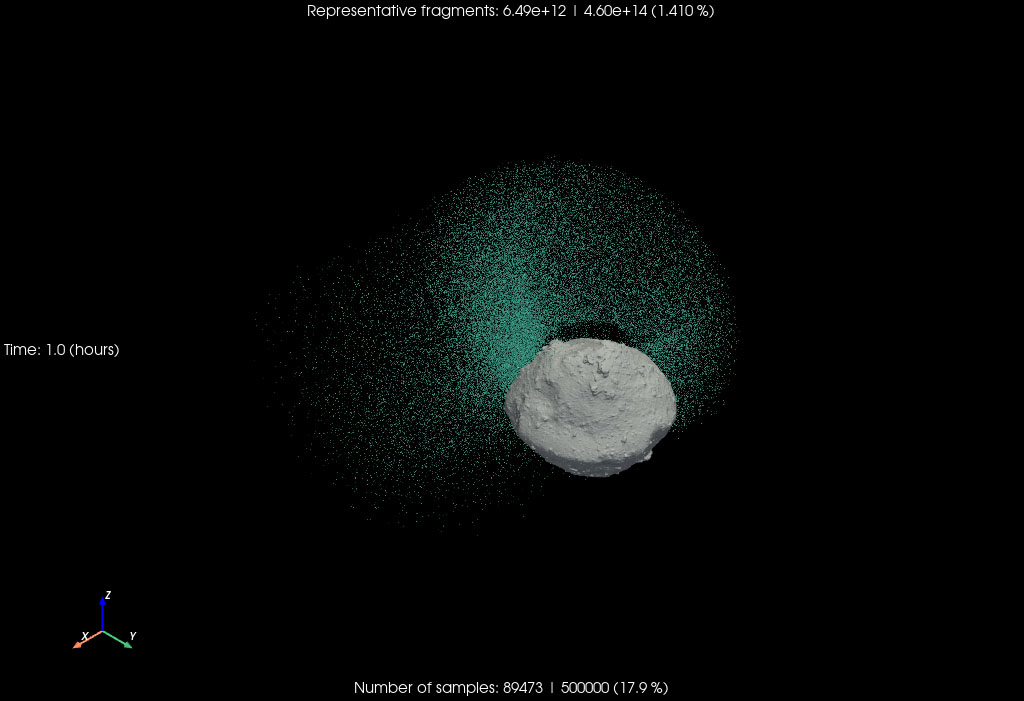
SPACE BREAK-UP FORENSICS: UNRAVELLING THE SECRETS OF EXPLOSIONS AND COLLISIONS IN SPACE

Join DAER’s COMPASS and ASTRA Teams at the WIRED Festival

6S CUBESAT TEAM SUCCESSFULLY COMPLETES FINAL DESIGN REVIEW AT ESA

ENABLING FUTURE SMALL BODY OPERATIONS WITH AUTONOMY AND ROBOTICS RESEARCH

ADVANCES IN PSEUDOSPECTRAL CONVEX OPTIMIZATION METHODS FOR ENTRY, DESCENT, AND LANDING APPLICATIONS

LIVING THE LUNAR LIFE: NASA’S PLANS TO SEND HUMANS BACK TO THE MOON IN THE ARTEMIS PROGRAM
REACHING FOR THE MOON: TRAJECTORY OPTIMIZATION & ON-BOARD GUIDANCE DESIGN FOR THE ESA ARGONAUT MISSION

INCONTRI POLIMI: LA LUCE DELLE STELLE - LICIA TROISI INCONTRA FRANCESCO TOPPUTO

LA SCATOLA DI ARCHIMEDE: UN PIANETA DI RISERVA?

ESA BIC MILAN: PRESENTATO AL POLITECNICO DI MILANO IL PROGRAMMA CHE SUPPORTA LE MIGLIORI STARTUP SPACE TECH

ESA BIC MILAN Kick-Off Event

INAUGURATA LA MOSTRA-EVENTO “SPAZIO ALLO SPAZIO”
SPAZIO ALLO SPAZIO - For the Next Larger Context
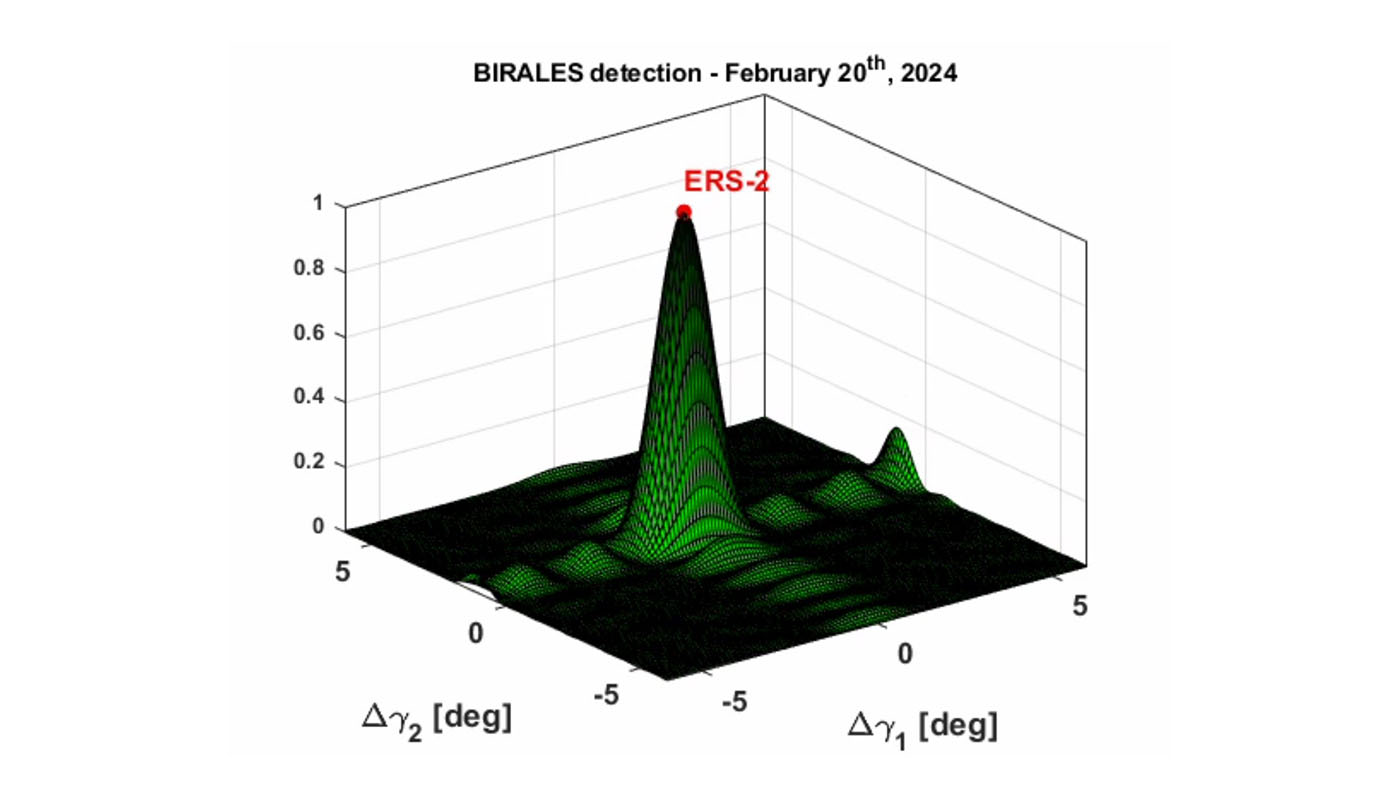
DAER CONTRIBUTION TO THE REENTRY CAMPAIGN OF THE ESA SATELLITE ERS-2
THE KOOPMAN OPERATOR IN ASTRODYNAMICS: ESTIMATION, CONTROL, AND OPTIMIZATION

INTRODUCTION TO GNC DESIGN FOR PLANETARY LANDING
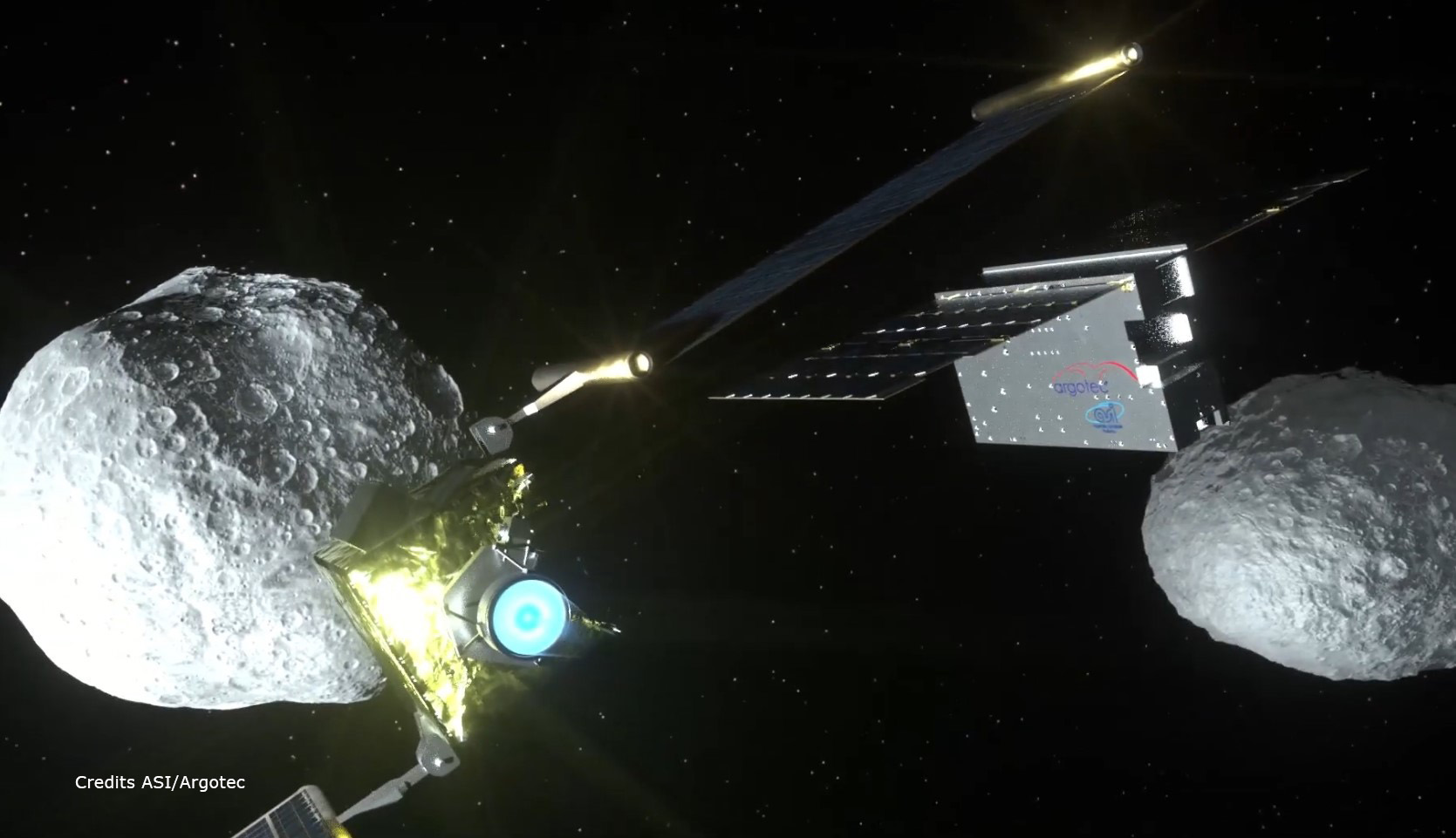
THE DART/LICIACube MISSION, THE FIRST SUCCESSFUL TEST OF AN ASTEROID DEFLECTION

AI TECHNOLOGIES AND SIMULATION TOOLS FOR SSA - SPACE SUSTAINABILITY AND POLICY

TWO POSTDOCS POSITIONS OPEN AT POLIMI ON SPACE TRAFFIC MANAGEMENT
NEW JSSE PAPER ON FRAGMENTATION RADAR OBSERVATION AND RECONSTRUCTION

DAER AT 2024 AIAA SCITECH FORUM
AUTONOMOUS MINIATURIZED DISTRIBUTED SPACE SYSTEMS
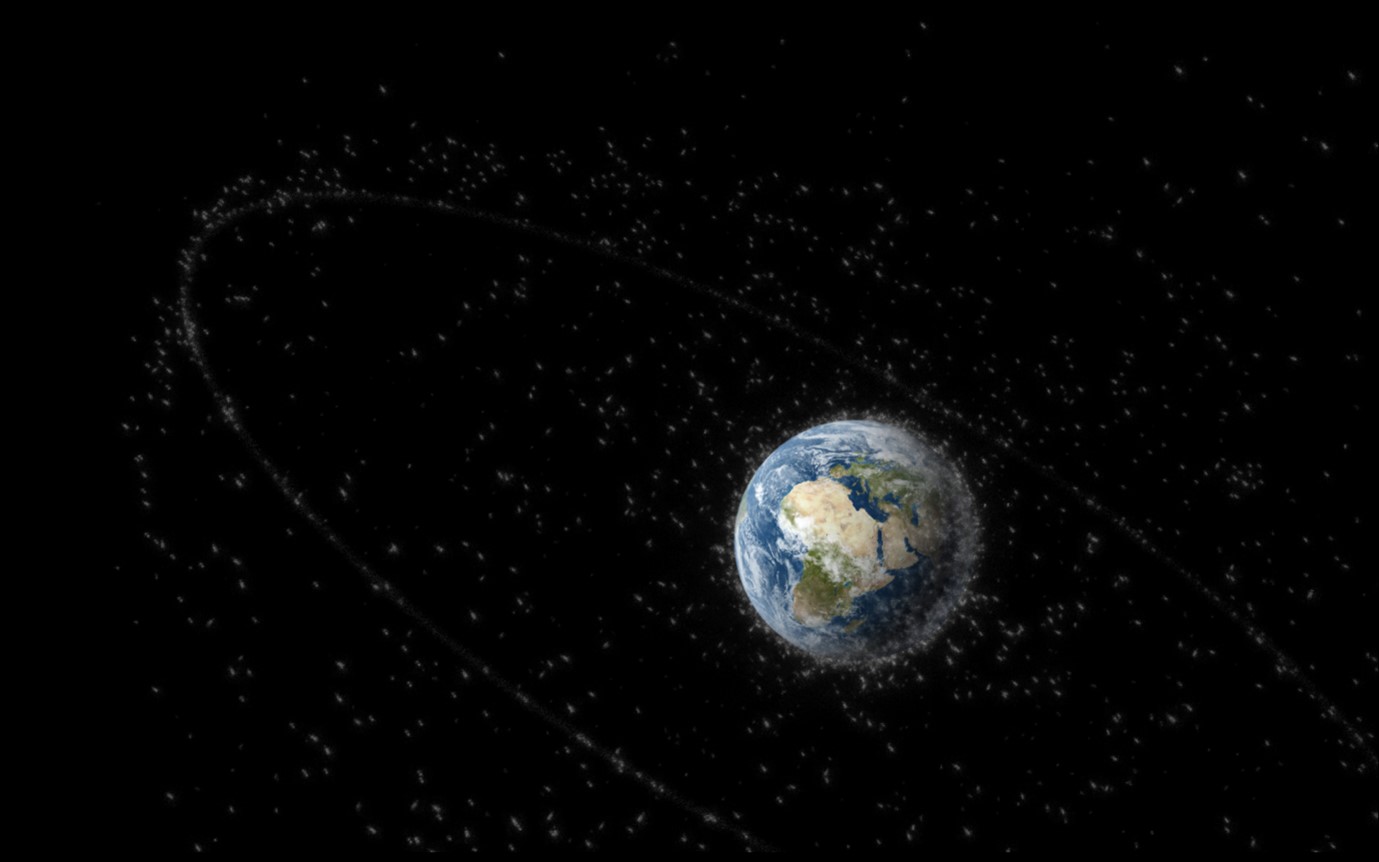
SPACE DEBRIS: STATUS OF THE ENVIRONMENT & MITIGATION MEASURES
RemoveDEBRIS: THE FIRST EUROPEAN ADR DEMONSTRATION MISSION
RENDEZVOUS TRAJECTORY OPTIMIZATION CONSIDERING RELATIVE NAVIGATION ERROR
PAST, CURRENT AND FUTURE CHALLENGES IN THE BUILD-UP AND MAINTENANCE OF SPACE OBJECTS CATALOGUES
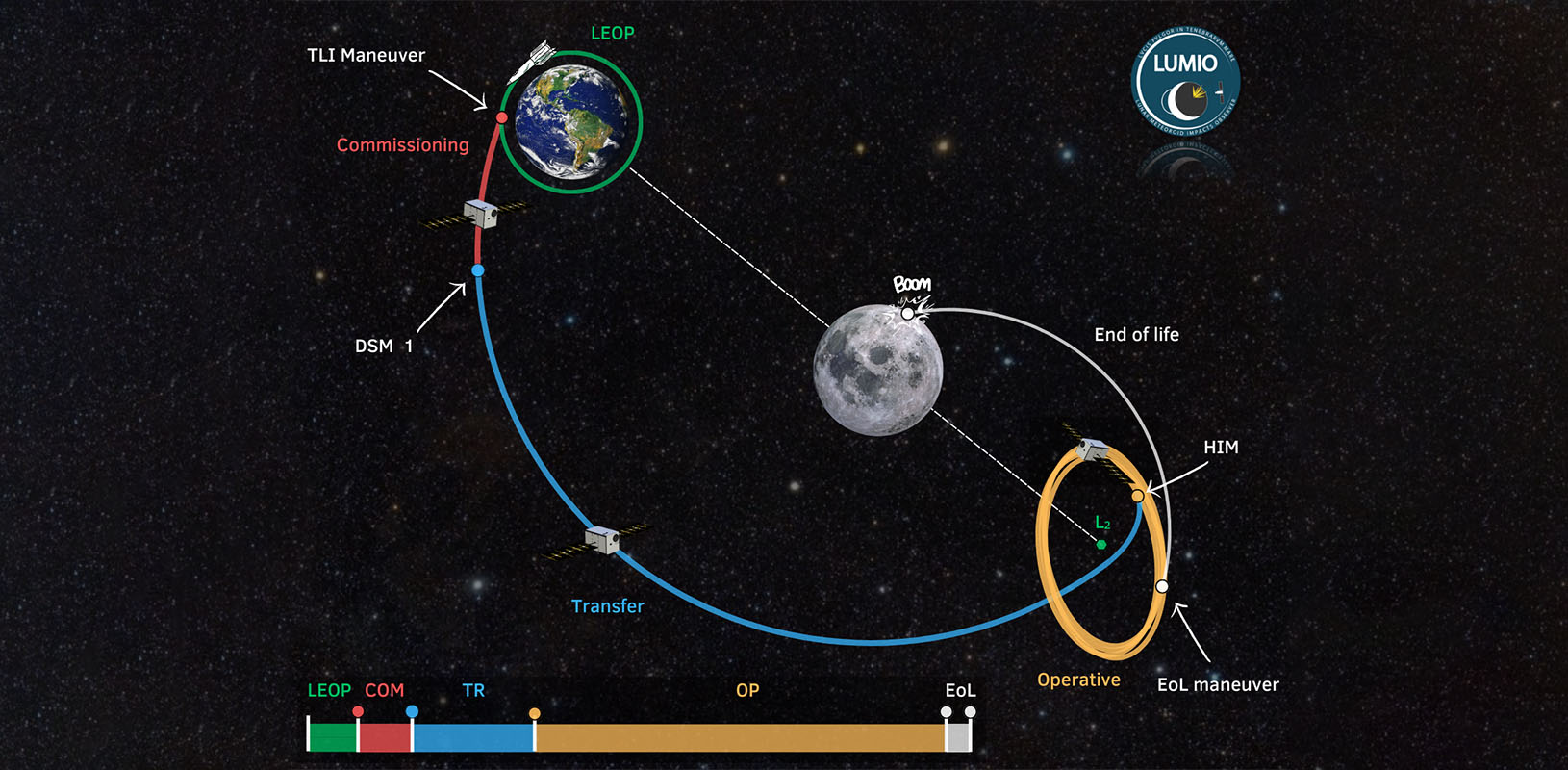
POLITECNICO DI MILANO ANNOUNCES THE SUCCESS LUMIO’S PRELIMINARY DESIGN

ASI SCHOLARSHIPS AT DAER FOR IAC AND SGC 2023 PARTECIPATION

JUICE MISSION DESIGN TO JUPITER AND ITS MOONS
DAER CONTRIBUTION TO THE REENTRY CAMPAIGN OF THE ESA SATELLITE AEOLUS

IL PROGETTO TASTE PASSA CON SUCCESSO LA MISSION DESIGN REVIEW

PROGETTO ORACLE - VERSO LA LUNA

DAER PHD CANDIDATE AWARDED WITH ZONTA INTERNATIONAL AMELIA EARHART FELLOWSHIP 2023

DAER @ AEROSPACE EUROPE CONFERENCE 2023 - JOINT 10TH EUCASS & 9TH CEAS
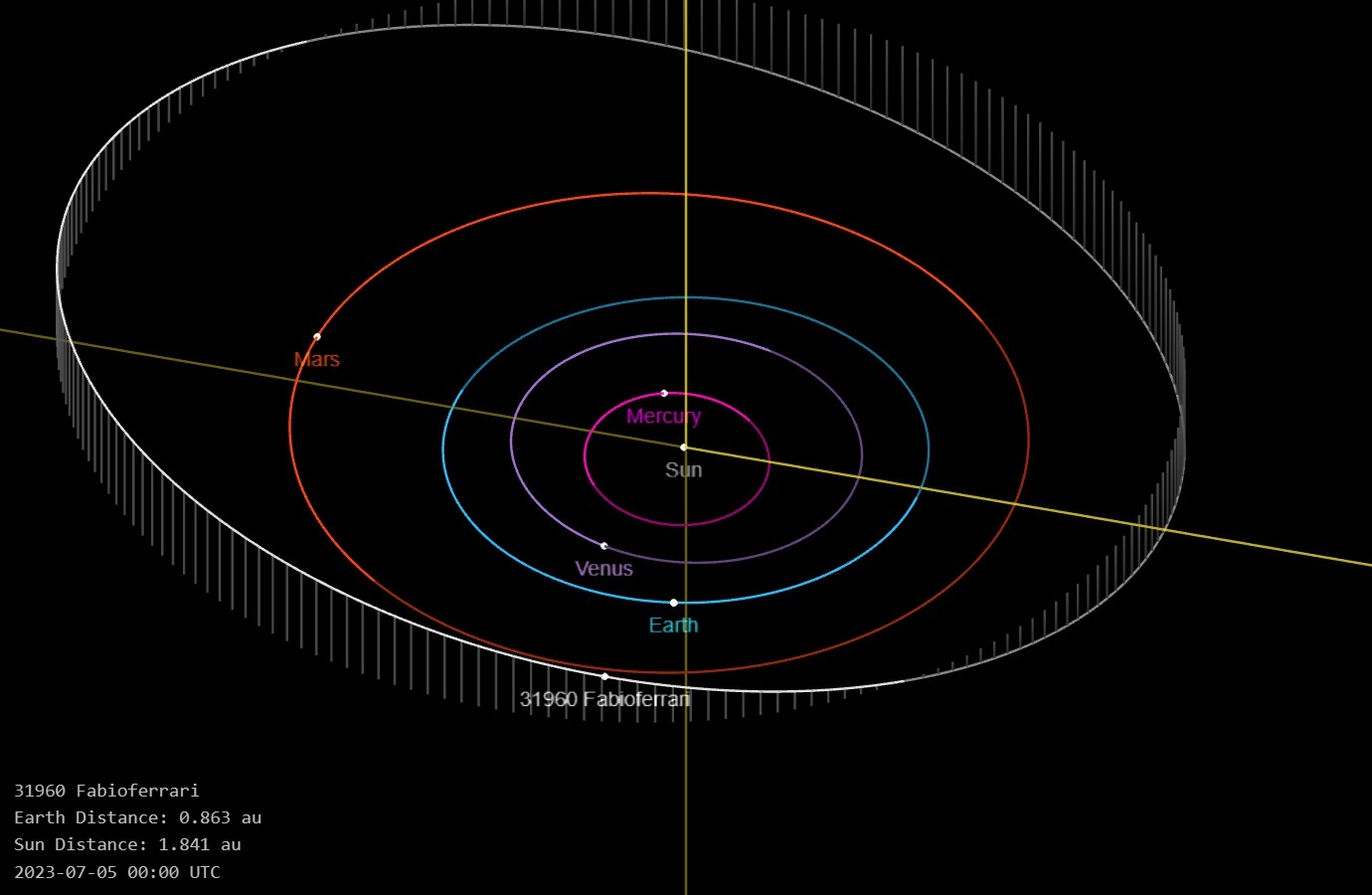
ASTEROIDE INTITOLATO A FABIO FERRARI
KICK-OFF OF THE ERC-FUNDED PROJECT GUIDO
DAER RESEARCHER WORK ON ELECTROSTATIC FLIGHT PUBLISHED IN THE HANDBOOK OF SPACE RESOURCES

AMALIA ERCOLI FINZI E MICHÈLE LAVAGNA ALLO SPECIALE TG1 "RITORNO SULLA LUNA"

IMPRONTE POLITECNICHE: MICHÈLE LAVAGNA INTERVIEWS AMALIA ERCOLI FINZI
A NEW MSCA FELLOWSHIP AT DAER

DAER AT 33RD AAS/AIAA SPACE FLIGHT MECHANICS MEETING

HUBERT CURIEN AWARD TO AMALIA ERCOLI FINZI
GREEN SPECIES: CAMILLA COLOMBO OBTAINS AN ERC CONSOLIDATOR GRANT
POLITECNICO DI MILANO TOWARDS AUTONOMOUS SPACE EXPLORATION WITH THE ERC-POC PROJECT GUIDO

UNCUBES HAS WON THE 3RD PLACE IN THE #T-TEC - TELESPAZIO TECHNOLOGY CONTEST

DAER CONTRIBUTION TO THE REENTRY CAMPAIGN OF LONG MARCH CZ-5B ROCKET

FABIO FERRARI A "CASA ITALIA" SU RAI 2
FABIO FERRARI IS AWARDED AN ERC STARTING GRANT

DAER RESEARCHERS PUBLISHED NEW BOOK ON SPACECRAFT GUIDANCE, NAVIGATION AND CONTROL

DAER AT THE 1ST ITALIAN CONGRESS "VERSO UNA CAPACITÀ NAZIONALE DI SORVEGLIANZA DELLO SPAZIO"
ELEONORA ANDREIS WON THE FIRST PRIZE IN THE 2022 STUDENT CONFERENCE COMPETITION
LE UNIVERSITÀ MILANESI E IL MISTERO. UNKNOWN UNKNOWNS... IN SPACE

INTERPLANETARY SATELLITES: THE MISSION OF ALESSANDRA MANNOCCHI

POLITECNICO DI MILANO LEADS THE LUMIO MISSION PHASE B STUDY

MASSIVE PARTICIPATION BY DAER AND POLIMI AT THE 73RD INTERNATIONAL ASTRONAUTICAL CONGRESS 2022 IN PARIS
LICIACUBE, ITALIAN MADE CUBESAT
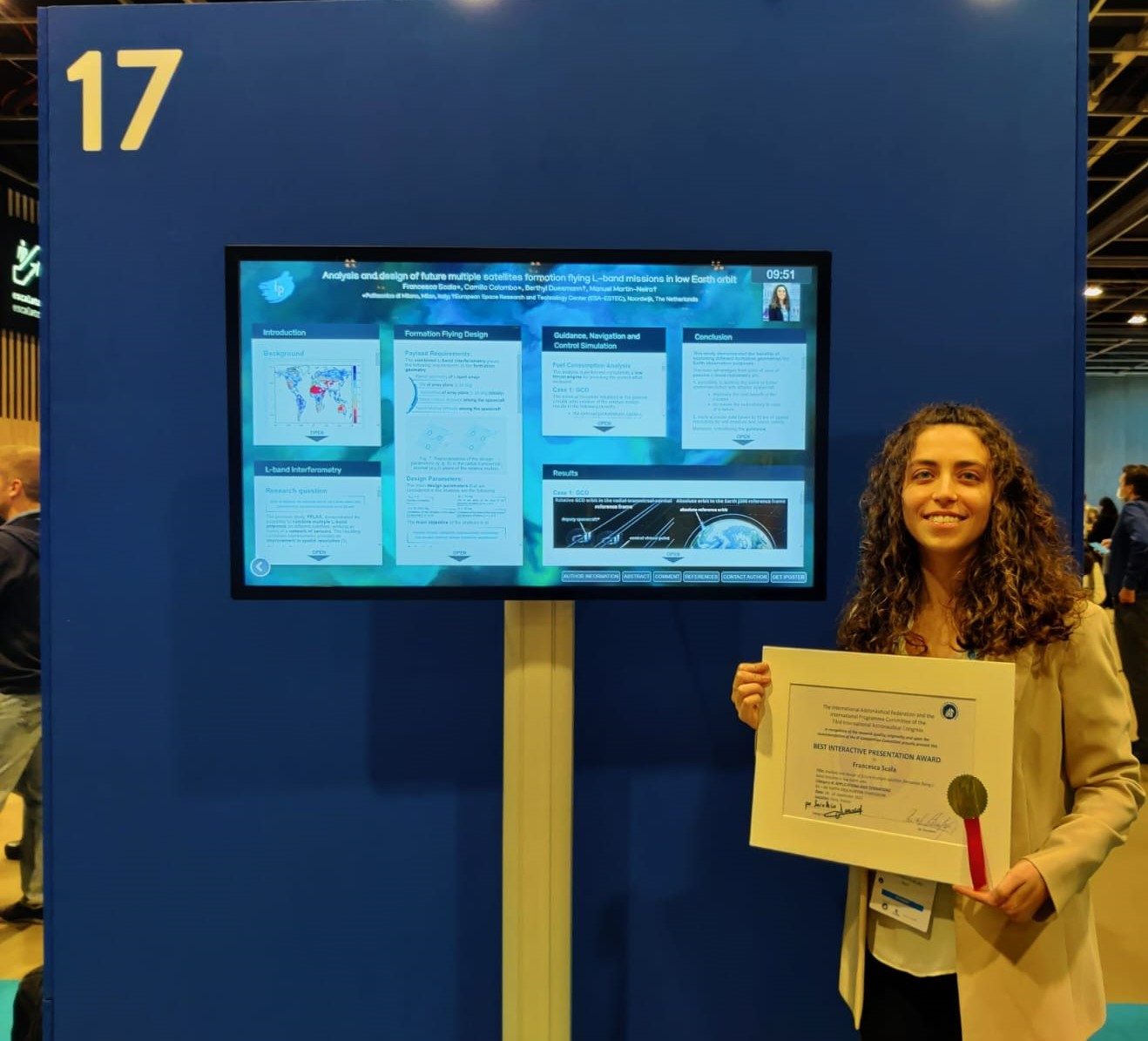
IAC2022 - FRANCESCA SCALA WON THE BEST INTERACTIVE PRESENTATION AWARD
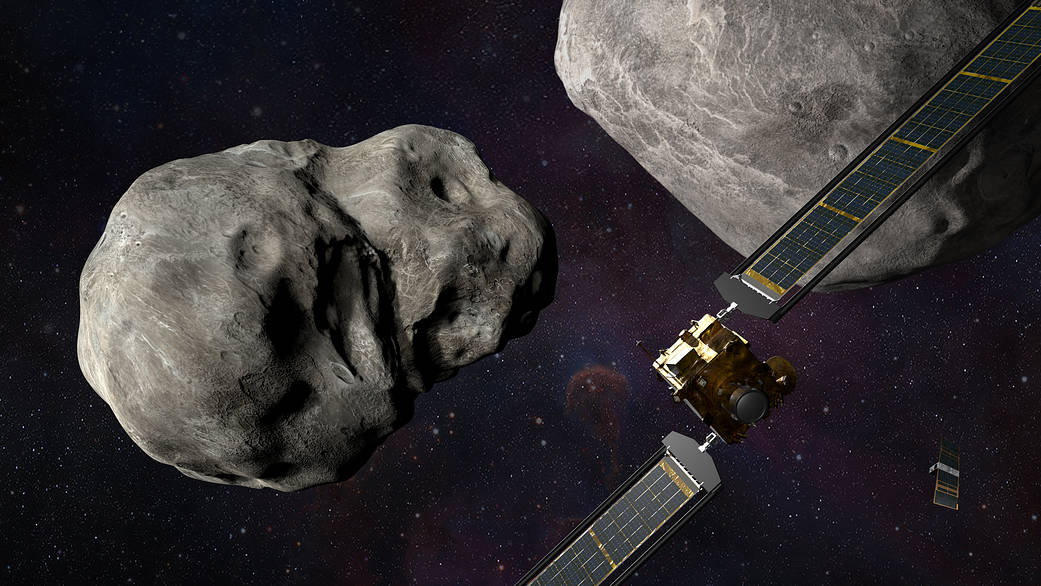
DART IMPACT ON ASTEROID DIMORPHOS

THREE PH.D. CANDIDATES DAER AWARDED ASI SCHOLARSHIPS

FRANCESCA SCALA AWARDED ESA-ISEB STUDENT SPONSORSHIP FOR IAC22

MICHÈLE VOLEVA VOLARE… OLTRE L’ATMOSFERA
MIRKO TRISOLINI, MSCA RESEARCHER AT DAER
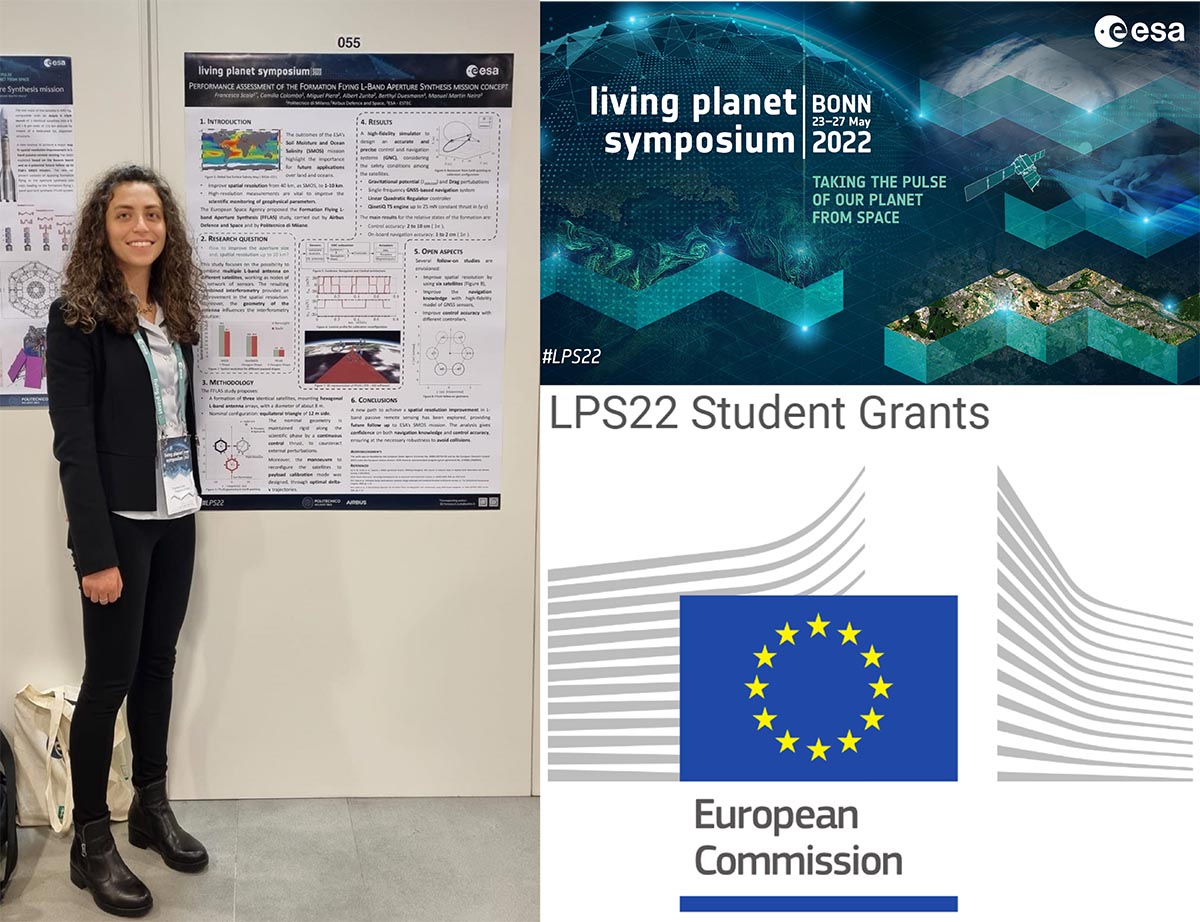
FRANCESCA SCALA HAS BEEN AWARDED THE LPS22 STUDENT GRANT

EUCASS-3AF 2022 - MICHELE BECHINI AWARDED BEST PAPER PRIZE

IWSCFF | MILANO, JUNE 7-10, 2022

ETHAN BURNETT MSCA@DAER

6TH EUROPEAN SPACE DEBRIS MODELLING, AND REMEDIATION WORKSHOP BY CNES AND POLITECNICO DI MILANO

FRANCESCO TOPPUTO E FRANCO BERNELLI ZAZZERA A VOCI DI FRONTIERE
POLITECNICO DI MILANO TOWARDS AUTONOMOUS SPACE EXPLORATION WITH THE ERC-POC PROJECT SENSE
ROVER MISSIONE EXOMARS INTITOLATO AD AMALIA ERCOLI FINZI

ASI SCHOLARSHIP WINNER IN COMPASS!

EXPO2020 DUBAI: INTERVISTA A MICHÈLE LAVAGNA

ESA PROJECT ON ROBUST TRAJECTORY DESIGN WITH UNCERTAINTIES

PH.D. CANDIDATE C. HOFMANN HAS BEEN AWARDED THE ROBERTO ROCCA DOCTORAL FELLOWSHIP
ACQUA DAL TERRENO LUNARE: UN PROGETTO POLIMI E OHB-I

SUSTAINABILITY IN SPACE ACTIVITIES FOR ENHANCED SERVICES ON EARTH (C. COLOMBO)

AMALIA ERCOLI FINZI INTERVISTATA SU LA7

MICHÈLE LAVAGNA SU "D - LA REPUBBLICA"

MEETMETONIGHT 2020

ELVINA FINZI RACCONTA IN TV DI SUA MADRE AMALIA
BACK TO SPACE: IN 2024 POLITECNICO DI MILANO WILL TAKE PART TO THE FIRST PLANETARY DEFENSE MISSION

AMALIA ERCOLI FINZI A "OGGI È UN ALTRO GIORNO" RAI1

DAER PHD CANDIDATE AWARDED WITH ZONTA INTERNATIONAL AMELIA EARHART FELLOWSHIP

IL LANCIO DELLA CREW DRAGON DI SPACE X

CUBESAT ESPLORATORI SPAZIALI "LOW COST"

AMALIA ERCOLI FINZI TRA LE 50 DONNE DEL 2019 SECONDO IL CORRIERE DELLA SERA

AMALIA ERCOLI FINZI NOMINATA AMBASCIATRICE DELLA GRANDE MILANO

DEPARTMENT OF AEROSPACE SCIENCE AND TECHNOLOGY TO CONQUER THE SOLAR SYSTEM WITH THE ERC-FUNDED PROJECT EXTREMA

THE SPIRAL PROJECT WON THE FIRST PRICE AT THE #T-TEC EVENT

POLIMOON | LUMIO MISSION: THINKING INSIDE THE BOX

POLIMOON | LA LUNA IN PILLOLE AL PLANETARIO
POLIMOON | LA MISSIONE APOLLO: EMOZIONI DI ALLORA E DI OGGI

FESTIVAL BERGAMO SCIENZA “OBIETTIVO LUNA”

INTERNATIONAL NASA SPACE APPS 2019 - MILANO

BE PART OF THE SPACE FUTURE, TAKE PART TO THE EUROPEAN SPACE TALKS

MEETMETONIGHT 2019
POLIMOON DOWSER AND THE RICH POT OF THE MOON
COME SULLA TERRA, COSÌ NELLO SPAZIO: #NOPOLLUTION #PLASTICFREE #WATERISLIFE

WORLD ECONOMIC FORUM ERC

COMPASS AT THE OPEN DAY OF THE EUROPEAN INSTITUTIONS

MICHÈLE LAVAGNA - ATTRATTI DALLA LUNA - NAUTILUS RAI SCUOLA

AMALIA ERCOLI FINZI TRA LE 50 ITALIANE PIÙ INFLUENTI DEL 2018
POLITECNICO DI MILANO PARTNER OF EU-FUNDED PROJECT “STARDUST RELOADED

INTERNATIONAL NASA SPACE APPS 2018 - MILANO

MEETMETONIGHT 2018

HERMES@H2020: NANOSATELLITES CLUSTER FOR MULTI-MESSENGER ASTROPHYSICS

CAMILLA COLOMBO TRA LE 5 DONNE POLITECNICHE
ASTEROID 24890 “AMALIAFINZI”
